Arduino:Библиотеки/Servo: различия между версиями
Myagkij (обсуждение | вклад) Нет описания правки |
Нет описания правки |
||
| (не показаны 4 промежуточные версии 1 участника) | |||
| Строка 1: | Строка 1: | ||
{{Arduino панель перехода}} | {{Arduino панель перехода}} | ||
{{Перевод от Сubewriter}} | {{Перевод от Сubewriter}} | ||
| Строка 6: | Строка 5: | ||
=Библиотека Servo<ref>[https://www.arduino.cc/en/Reference/Servo Servo]</ref>= | =Библиотека Servo<ref>[https://www.arduino.cc/en/Reference/Servo Servo]</ref>= | ||
Эта библиотека позволяет плате | Эта библиотека позволяет [[Arduino:Продукты/Продукты Arduino|плате Arduino]] управлять [[РУ-сервомотор]]ами – это устройства, оснащенные шестернями и валом, которыми можно управлять с высокой точностью. У стандартных [[сервомотор]]ов вал может перемещаться под разными углами – как правило, в диапазоне от 0 до 180 градусов. У сервомоторов непрерывного вращения вал может вращаться на разных скоростях. | ||
Благодаря | Благодаря библиотеке Servo большинство [[Arduino:Продукты/Продукты Arduino|плат Arduino]] могут поддерживать до 12 [[сервомотор]]ов, а модель [[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|Mega]] – 48 [[сервомотор]]ов. На всех платах, кроме [[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|Mega]], эта библиотека не дает работать функции [[Arduino:Справочник языка Arduino/Функции/Аналоговый ввод/вывод/analogWrite()|analogWrite()]] (ШИМ) на 9-ом и 10-ом контактах, причем независимо от того, подключен ли к ним [[сервопривод]] или нет. Однако на [[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|Mega]] ШИМ-функциональности ничего мешать не будет, но только если вы будете использовать до 12 [[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|сервомотор]]ов. Но если использовать от 12 до 23 [[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|сервомотор]]ов, это отключит [[ШИМ]] на 11-ом и 12-ом контактах. | ||
==Цепь== | ==Цепь== | ||
[[Arduino:Продукты/Продукты Arduino/Плата Arduino Mega 2560|Сервомотор]]ы используют три провода: для питания, «земли» и сигнала. Питающий провод, как правило, красного цвета и должен быть подключен к 5-вольтовому контакту на [[Arduino:Продукты/Продукты Arduino|плате Arduino]]. Провод для «земли», как правило, черного или коричневого цвета и должен быть подключен, соответственно, к контакту с «землей» на [[Arduino:Продукты/Продукты Arduino|плате Arduino]]. Провод для сигнала, как правило, желтого цвета и должен быть подключен к цифровому контакту на [[Arduino]]. Имейте в виду, что [[сервомотор]]ы довольно прожорливы в плане потребления электроэнергии, поэтому если вы планируете использовать больше 1-2 [[сервомотор]]ов, то их лучше запитать от отдельного источника (или, другими словами, не от 5-вольтового контакта на [[Arduino]]). Убедитесь, что контакты с «землей» у [[Arduino]] и внешнего источника питания соединены друг с другом. | |||
==Функции== | ==Функции== | ||
| Строка 25: | Строка 24: | ||
==Примеры== | ==Примеры== | ||
<gallery mode="traditional" widths=200px heights=200px> | |||
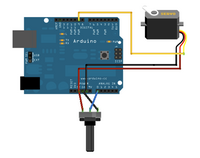
Файл:Knob bb.png|link=Arduino:Примеры/Knob|[[Arduino:Примеры/Knob|Как настроить Arduino Robot таким образом, чтобы при кручении потенциометра вращался вал сервомотора.]] | |||
Файл:Sweep bb.png|link=Arduino:Примеры/Sweep|[[Arduino:Примеры/Sweep|Вращение валом сервомотора вперед и назад.]] | |||
</gallery> | |||
=См.также= | =См.также= | ||
| Строка 34: | Строка 35: | ||
<references /> | <references /> | ||
{{Навигационная таблица/Arduino | |||
{{Навигационная таблица/Портал/Arduino}} | |||
[[Категория:Стандартные библиотеки]] | [[Категория:Стандартные библиотеки]] | ||
Текущая версия от 11:16, 8 июля 2023
| Содержание | Знакомство с Arduino | Продукты | Основы | Справочник языка Arduino | Примеры | Библиотеки | Хакинг | Изменения | Сравнение языков Arduino и Processing |
Библиотека Servo[1]
Эта библиотека позволяет плате Arduino управлять РУ-сервомоторами – это устройства, оснащенные шестернями и валом, которыми можно управлять с высокой точностью. У стандартных сервомоторов вал может перемещаться под разными углами – как правило, в диапазоне от 0 до 180 градусов. У сервомоторов непрерывного вращения вал может вращаться на разных скоростях.
Благодаря библиотеке Servo большинство плат Arduino могут поддерживать до 12 сервомоторов, а модель Mega – 48 сервомоторов. На всех платах, кроме Mega, эта библиотека не дает работать функции analogWrite() (ШИМ) на 9-ом и 10-ом контактах, причем независимо от того, подключен ли к ним сервопривод или нет. Однако на Mega ШИМ-функциональности ничего мешать не будет, но только если вы будете использовать до 12 сервомоторов. Но если использовать от 12 до 23 сервомоторов, это отключит ШИМ на 11-ом и 12-ом контактах.
Цепь
Сервомоторы используют три провода: для питания, «земли» и сигнала. Питающий провод, как правило, красного цвета и должен быть подключен к 5-вольтовому контакту на плате Arduino. Провод для «земли», как правило, черного или коричневого цвета и должен быть подключен, соответственно, к контакту с «землей» на плате Arduino. Провод для сигнала, как правило, желтого цвета и должен быть подключен к цифровому контакту на Arduino. Имейте в виду, что сервомоторы довольно прожорливы в плане потребления электроэнергии, поэтому если вы планируете использовать больше 1-2 сервомоторов, то их лучше запитать от отдельного источника (или, другими словами, не от 5-вольтового контакта на Arduino). Убедитесь, что контакты с «землей» у Arduino и внешнего источника питания соединены друг с другом.
Функции
Примеры

См.также
Внешние ссылки
| Arduino продукты | |
|---|---|
| Начальный уровень | Arduino Uno • Arduino Leonardo • Arduino 101 • Arduino Robot • Arduino Esplora • Arduino Micro • Arduino Nano • Arduino Mini • Arduino Starter Kit • Arduino Basic Kit • MKR2UNO • TFT-дисплей Arduino |
| Продвинутые функции | Arduino Mega 2560 • Arduino Zero • Arduino Due • Arduino Mega ADK • Arduino Pro • Arduino Motor Shield • Arduino USB Host Shield • Arduino Proto Shield • MKR Proto Shield • MKR Proto Large Shield • Arduino ISP • Arduino USB 2 Serial Micro • Arduino Mini USB Serial Adapter |
| Интернет вещей | Arduino Yun • Arduino Ethernet • Arduino MKR1000 • Arduino WiFi 101 Shield • Arduino GSM Shield V2 • Arduino WiFi Shield • Arduino Wireless SD Shield • Arduino Wireless Proto Shield • Arduino Ethernet Shield V2 • Arduino Yun Shield • Arduino MKR1000 Bundle |
| Носимые устройства | Arduino Gemma • Lilypad Arduino Simple • Lilypad Arduino Main Board • Lilypad Arduino USB • LilyPad Arduino SimpleSnap |
| 3D-печать | Arduino Materia 101 |
| Устаревшие устройства | - |
| Примеры Arduino | |
|---|---|
| Стандартные функции | |
| Основы |
|
| Цифровой сигнал |
|
| Аналоговый сигнал |
|
| Связь |
|
| Управляющие структуры |
|
| Датчики |
|
| Дисплей |
Примеры, объясняющие основы управления дисплеем:
|
| Строки |
|
| USB (для Leonardo, Micro и Due плат) |
В этой секции имеют место примеры, которые демонстрируют использование библиотек, уникальных для плат Leonardo, Micro и Due.
|
| Клавиатура |
|
| Мышь |
|
| Разное | |
- Страницы, использующие повторяющиеся аргументы в вызовах шаблонов
- Справочник языка Arduino
- Arduino
- Перевод от Сubewriter
- Проверка:myagkij
- Оформление:myagkij
- Редактирование:myagkij
- Страницы, где используется шаблон "Навигационная таблица/Телепорт"
- Страницы с телепортом
- Стандартные библиотеки
- Стандартная библиотека
- Стандартная библиотека Arduino
- Стандартные библиотеки Arduino
- Библиотека Servo
- Стандартная библиотека Servo
- Servo